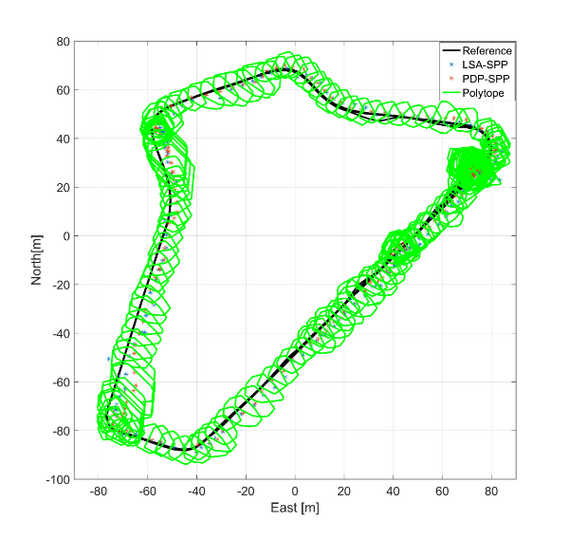
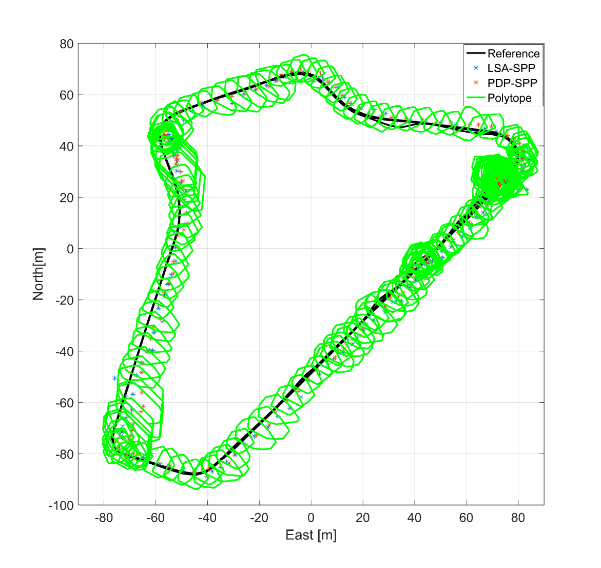
Intervals (Jaulin et al 2001) can be seen as a natural way to bound observation uncertainy in navigation systems such as GPS, IMU or optical sensors like LIDAR, since they are in principle free of any assumption about probability distributions and can thus describe adequately remaining systematic effects (Schön 2016, Schön and Kutterer 2006). In an ongoing project (Dbouk and Schön 2019) we used intersections of observation intervals to compute feasible positioning domains and to exclude large outliers, cf. Fig. 1. However, all results are based on - meaningful - assumptions about the respective intervals.
In this project, we intent to experimentally investigate in more details the actual size of observation intervals. To this end, the mapathon data will be re-analyzed and new dedicated experiments in urban environments as well as laboratory experiments in the new HITEC building, are designed and carried out with high-end as well as typical GNSS and IMU equipments. Special focus will be on the inclusion of remaining deviations in GNSS code and phase observations. For inertial sensors, methods should be developed to propagate the interval uncertainty through the strap-down differential equation without artificially blowing up the interval size.


Schneiderberg 50
30167 Hannover



