Uncertainty Modeling for Kinematic LiDAR-based Multi-Sensor Systems
Dominik Ernst, M. Sc.
Erstbetreuer: I. Neumann; Co-Betreuer:
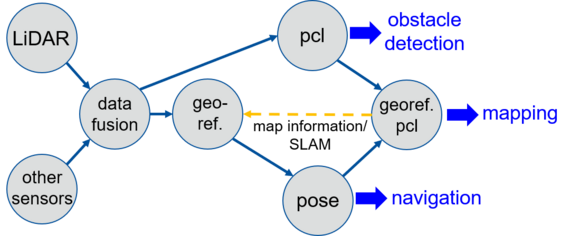
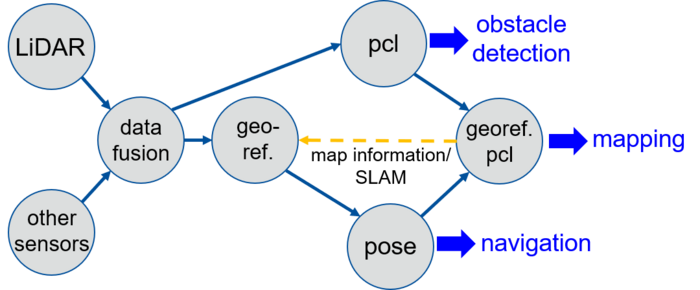
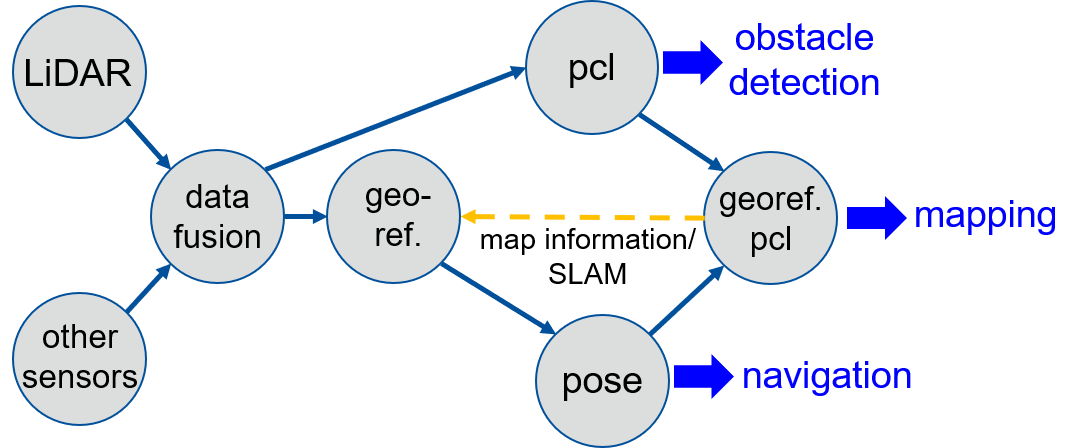
Light detection and ranging sensors (LiDARs) are widely used in different applications. Their ability to directly capture 3D data enables new uses and complements other sensors. The point clouds from LiDARs are used for localization, fusion with image data and general perception of the environment, e.g. for obstacle detection. Opposed to terrestrial laser scanners (TLS), which are high-end LiDARs used in geodetic applications, the uncertainty analysis of low-cost multi-beam or solid state LiDARs is still neglected, even though there are important in different applications. As two examples, the usage in multi-sensor systems (MSSs) as kinematic scanning systems in surveying and as additional sensors for autonomous vehicles can be named.
The uncertainty modeling is important, since especially for autonomous systems, the decision based on the acquired data can lead to dangerous situations for humans and the environment. Consistently predicted uncertainty information can help further algorithms for localization or object tracking to make proper decisions. Consistently means, that the confidence of the system, which is the predicted uncertainty, should match the actual accuracy. This can be checked in several ways, e.g. by hypothesis testing. Furthermore, the predicted uncertainty is needed for the determination of the integrity, which is already a standard for aircraft. Goal of this PhD project is to investigate methods to enable a consistent estimation of uncertainties for LiDAR-based MSSs, whle dealing with the challenges caused by the uncertainties of individual sensors and their interactions in the system.
Nienburger Straße 1-4
30167 Hannover



