M.Sc. Uyen Nguyen
Main Supervisor: C. Heipke; Co-Supervisor: F. Rottensteiner
People detection and tracking are significant for applications related to autonomous driving, robotics, safety surveillance, etc. Most tracking work focuses on assigning and generating a complete trajectory rather than improving the geometric accuracy of the resulting trajectories in world coordinates. However, in many practical applications such as autonomous driving the geometric accuracy is a significant factor need to be taken into account.
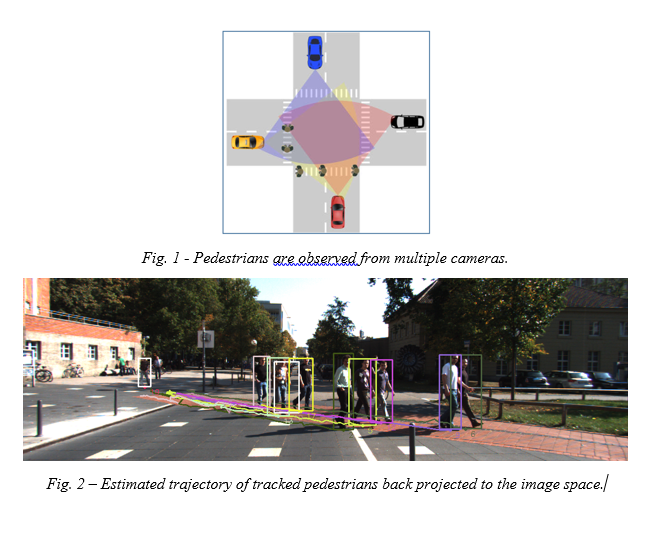
In this project, we address the pedestrian tracking problem using stereo images. With stereopsis information, 3D position in object space of tracked people can be estimated, which is significant for applications related to autonomous driving. Moreover, we also extend the multiple persons tracking problem from only single viewpoint to multiple perspectives so that lacking information from a certain viewpoint can be fulfilled by the others. A scenario was set up in which multiple moving cars collaboratively carried out the tracking task, illustrated in Fig.1.
Our tracking system is based on tracking-by-detection method, which comes in three phases: first, an object detector performs in each image independently; second, corresponding detections in different frames are associated w.r.t each other; finally, a filter step is employed to smooth the trajectory based on their previous states. Fig. 2 shows exemplary trajectory of tracked pedestrians back projected to the image space.
Nienburger Straße 1
30167 Hannover




