In den Landesvermessungsbehörden liegen flächendeckende, kontrollierte Airborne Lascerscanning Punktwolkendatensätze (ALS) mit unterschiedlichen Punktdichten vor, welche i.d.R. mindestens in die Klassen Boden- und Nichtbodenpunkte differenziert werden. Diese Klassen stellen die minimal benötigte Information dar, die es den Landesvermessungsbehörden ermöglicht, ein Digitales Geländemodell (DGM) und ein Digitales Oberflächenmodell (DOM) aus diesen Punktwolken abzuleiten. ALS-Punktwolken besitzen eine hohe Positions- und Höhengenauigkeit, haben aber eine vergleichsweise schlechte Punktauflösung von nur rund 4-16 Punkten/m². In der Arbeitsgemeinschaft der Vermessungsverwaltungen (AdV) wird ein Aktualisierungszyklus für ALS-Punktwolken von 10 Jahren diskutiert. Weiterhin leiten die Landesvermessungsämter auf Basis von digitalen Bildflügen mit hohen Überlappungen 3D-Punktwolken mit dem sogenannten „Dense-Image-Matching“-Verfahren (DIM) ab, welche eine Auflösung im Pixelbereich besitzen, was etwa 100 Punkten/m² entspricht. Hierbei ist ein 2-3-jähriger Befliegungszyklus die Basis. Durch die unterschiedlichen Aufnahmesensoren mittels Laserscanners oder Kameras besitzen ALS- und DIM-Punktwolken neben der reinen Geometrie auch sensorspezifische Eigenschaften und Verhaltensweisen. Während durch die Lasermessung die Reflektionseigenschaften der getroffenen Objekte in Form einer Intensität und des Echoverlaufes aufgenommen werden, ergänzen radiometrische Information aus den Luftbildern die DIM-Punktwolken. Der Laserpuls ist im Stande, Vegetation zu penetrieren, was zur Folge hat, dass ALS-Punktwolken sowohl die Vegetation als auch dessen Geländestrukturen darunter enthalten. Aufgrund der Bildkorrelation sind DIM-Punktwolken i.d.R. auf ein Oberflächenmodell begrenzt, d.h. sie enthalten nur Geländepunkte unterhalb von Vegetation, sofern dieses Gelände in genügend Bildern sichtbar ist. Auch ist das Verhalten bezüglich Wassers zwischen den beiden Punktwolken unterschiedlich. Durch die Reflektion auf der Wasseroberfläche, kommt ein Laserpuls nur beim Empfänger an, wenn dieser in Nadir-Richtung ausgesendet wird. Als Konsequenz enthalten ALS-Punktwolken kaum Punkte auf der Wasseroberfläche. In DIM-Punktwolken ist die gesamte Wasseroberfläche rekonstruiert. Da die Wasseroberfläche keine Textur enthält, kommt es aber zu hohen Fehlerzuordnungen bei den Pixeln, die zu einer großen Streuung in der Höhe in den finalen Punktwolken führt.
Das Projekt fokussiert sich auf die Integration dieser beiden Punktwolkentypen in Form gemeinsamer Prozessierungsabläufe am Beispiel der Punktwolken-Klassifikation und der –Änderungsdetektion. Dabei werden Methoden entwickelt, die robust gegenüber der Punktgenauigkeit und –auflösung sind und die die speziellen Verhaltensweisen der beiden Punktwolkentypen bei bestimmten Objekttypen wie der Vegetation und von Wasser berücksichtigen und dabei qualitativ gute Ergebnisse unabhängig vom Punktwolkentyp erzielt.
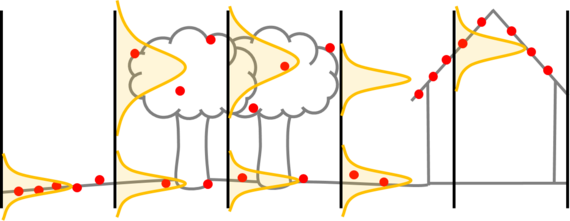
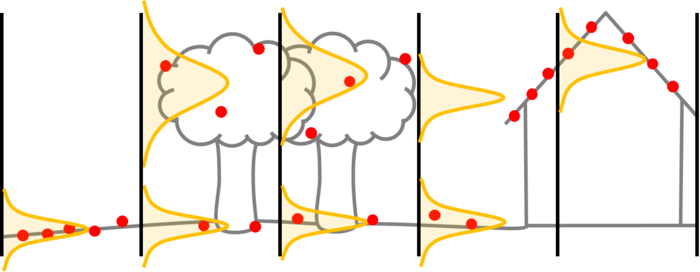
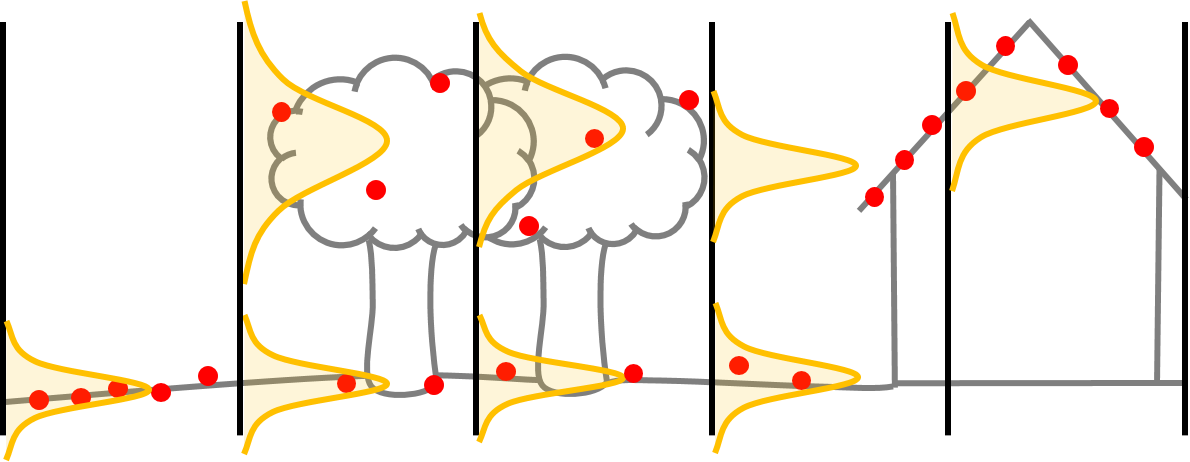
Für eine gemeinschaftliche Verarbeitung der beiden Punktwolkentypen auf landesweiter Ebene wurde eine rein geometrische Repräsentation der Punktwolken in Rasterformat gewählt, um so der unregelmäßigen Punktverteilung und –dichte entgegen zu wirken. Gleichzeitig werden damit die punktwolkenspezifischen Attribute aus dem Prozess gehalten. Mit einem geeigneten Modell werden die Punkte innerhalb einer Rasterzelle und abhängig ihrer Höhe in bis zu zwei Punktmengen unterteilt. Anschließend wurden innerhalb der Teilmengen Höhenverteilungen in Form von Normalverteilungen approximiert, die diese Punkte schließlich repräsentieren (s. Figur 1). Da die entwickelten Methoden landesweit angewendet werden sollen, wurden verschiedene Normalisierungsmethoden untersucht, die den Einfluss der Geländehöhe in der Geometrie unterschiedlich stark reduzierte, und somit die Mittelwerte der unteren Verteilungen gegen null gehen ließen. Diese geometrische Repräsentation wird sowohl für die Klassifikation als auch die Änderungsdetektion genutzt.
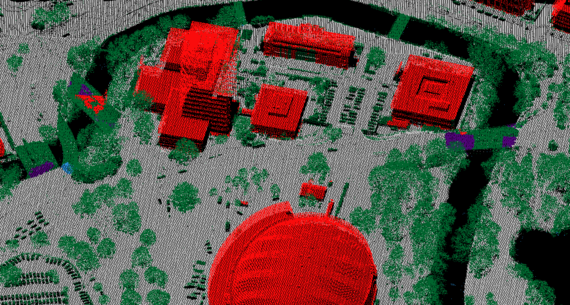
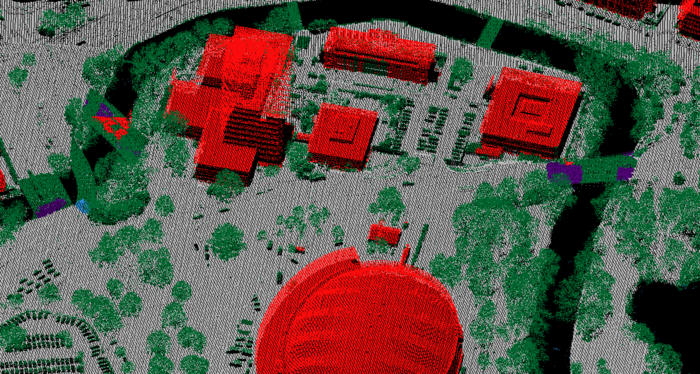
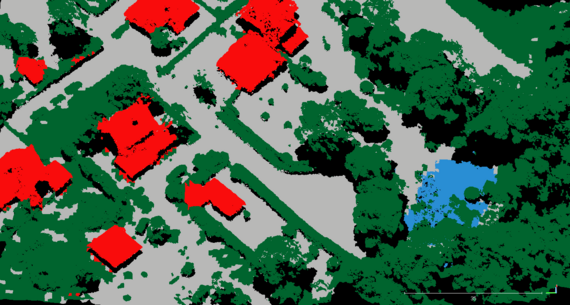
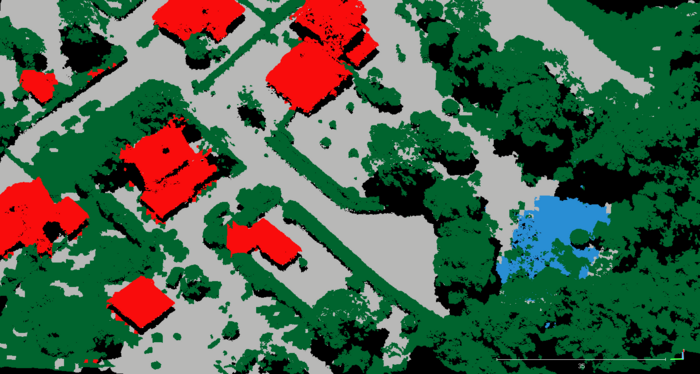
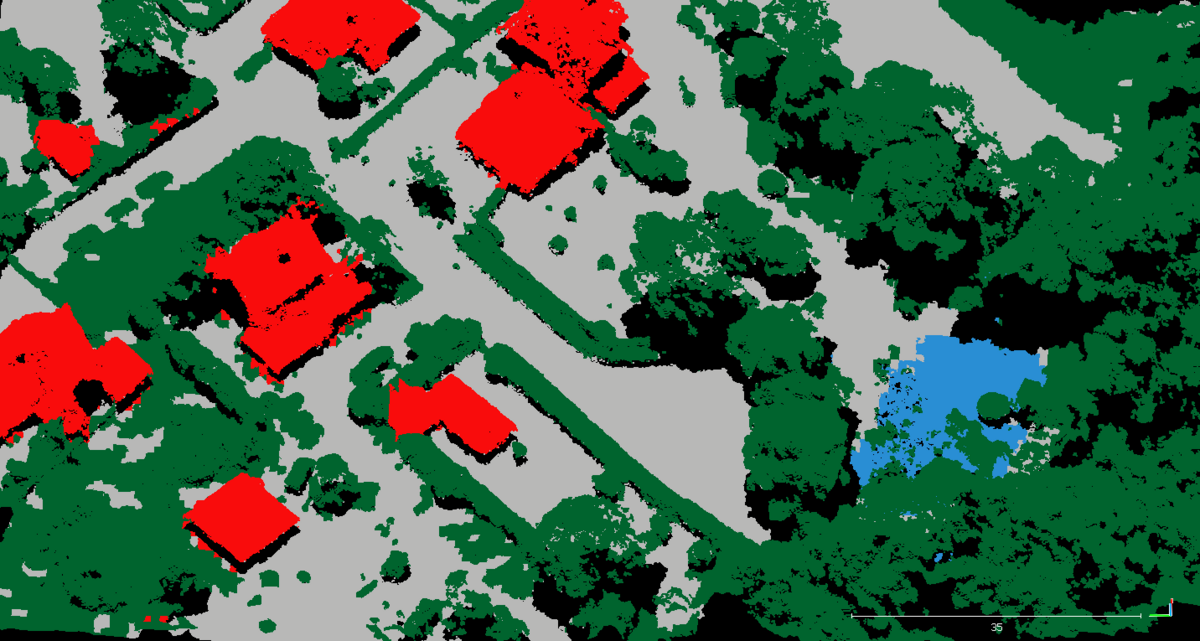
Für die Klassifikation wird ein Neuronales Netzwerk als Klassifikator genutzt, das eine Encoder-Decoder-Struktur besitzt, die Höhenverteilungen als Input nutzt und die Punktwolken in die Klassen Gelände, Gebäude, Wasser, Nicht-Gelände und Brücke klassifiziert. Das Netzwerk wurde auf Punktwolkendaten aus Rostock in Deutschland trainiert und auf anderen Gebieten ohne zusätzliches Fine-Tuning getestet. Dabei wird das Netzwerk zehnmal trainiert und das finale Ensemble aus Netzwerken entscheidet dann die jeweilige(n) Klasse(n) innerhalb einer Rasterzelle. Durch die angewendete Normalisierung der Höhenverteilung auf Höhe über Gelände konnten wir nachweisen, dass das einmal trainierte Neuronale Netzwerk im dazugehörigen Testgebiet bei Rostock für eine ALS-Punktwolke eine Klassifikationsgenauigkeit von bis zu 93.4% erreichen konnte. Auch bei der Anwendung des Klassifikators auf andere Gebiete erzielte dieser eine Gesamtgenauigkeit in den meisten Fällen von nur rund 1.5% weniger als im Testset des Trainingsgebietes. Wenn dasselbe Netzwerk auf DIM-Punktwolken trainiert wurde, erreichte die Klassengenauigkeit im Testgebiet Rostocks sogar bis zu 97.6%.

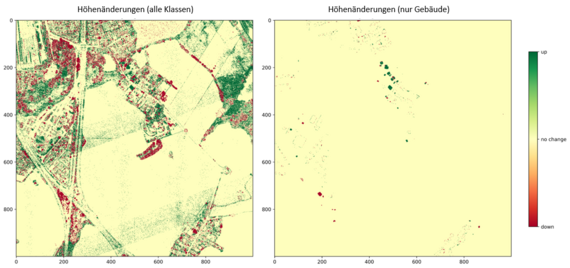
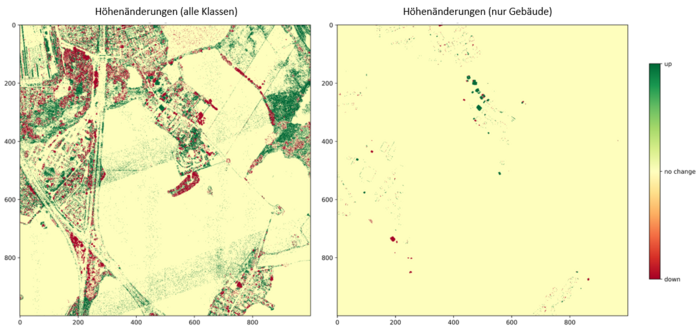
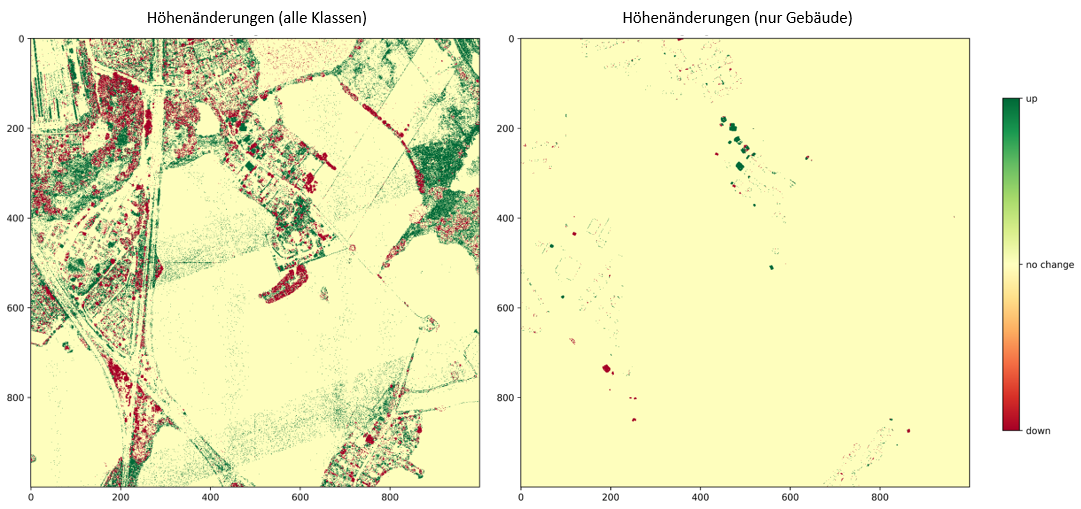
Die Höhenverteilungen und die Klassifikationsergebnisse werden erneut für die Änderungsdetektion genutzt. Dabei werden deren Unsicherheiten berücksichtigt. Die Höhenverteilungen zweier Punktwolken werden statistisch auf eine signifikante Änderung getestet, anhand dessen eine Entscheidung über eine Änderung zwischen den Datensätzen gefällt wird. Unter Nutzung der Klasseninformation können diese Ergebnisse dann für jede Zelle gefiltert werden.
Appelstraße 9A
30167 Hannover




