Supervisor: Prof. Dr.-Ing. C. Heipke
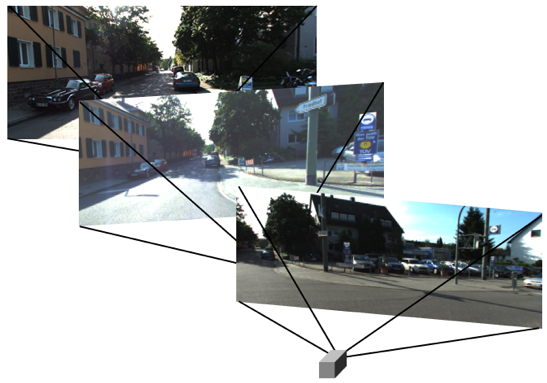
This dissertation project addresses the reconstruction of the 3D geometry of a scene using multiple images taken from different viewpoints. The focus of this project is put on the estimation of the uncertainty that arises in different processing steps of a multi-view stereo procedure, such as image orientation and image matching. Moreover, the individual uncertainties are to be propagated through the subsequent processing steps to obtain a complete and consistent measure for the uncertainty associated with the final 3D reconstruction. The main application scenario is situated in a street scenery, raising challenging conditions, for example, with respect to illumination, occlusions and dynamic objects. As a consequence, the uncertainty may vary significantly for different parts of the reconstruction. This highlights the relevance of estimating the uncertainty, on the one hand, for improving the quality of the reconstruction itself and, on the other hand, for providing this information to subsequent tasks that build on such a 3D reconstruction.
The methodology to be developed should be based on techniques from the deep learning domain and may extend prior work carried out in the Research Training Group that focus on uncertainty estimation for dense stereo matching using image pairs (Mehltretter, 2020; Zhong and Mehltretter, 2021).
References
Mehltretter, M. (2020): Uncertainty Estimation for End-To-End Learned Dense Stereo Matching via Probabilistic Deep Learning. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, V-2-2020, 161-169.
Zhong, Z. & Mehltretter, M. (2021): Mixed Probability Models for Aleatoric Uncertainty Estimation in the Context of Dense Stereo Matching. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, V-2-2021, 17-26.



