Supervisor: Prof. Dr.-Ing- S. Schön
The velocities of the different highly automated or autonomous vehicles in dynamic sensor networks describe how the network evolves over time and thus have an impact on potential critical states of the network. The timing information is crucial to synchronize and time-stamp measurements of the multiple sensors of each agent (Camera, LIDAR, Odometer, IMU, GNSS) and for inter-agent measurements. Integrity measures the trust that we can put into the navigation solution. Intervals can be seen as a natural concept to enclose minimum and maximum deviations of measurements and thus contribute to a description of integrity.
Based on the investigations of the previous cohorts (Dbouk and Schön 2020, Su and Schön 2021), this dissertation project will investigate interval-based methods for error detection in velocity and time determination. The focus is on data sets from GNSS Doppler observations and IMU data that were gathered and are to be collected during the Mapathons (Schön et al. 2018), i.e. the dedicated measurement campaigns of the research training group. In a first step, the observation intervals will be determined. Next, propagation approaches to the target parameters velocity and time has to be developed for GNSS position-velocity-time (PVT) solution and compared with classical estimation techniques, like e.g., Least Squares or filter approaches.
It is expected that the interval measures will help to detect and exclude outliers in GNSS Doppler observations even in situation of low redundancy and so increase the integrity of both for the velocity as well as for the determination of the GNSS-derived user time scale.
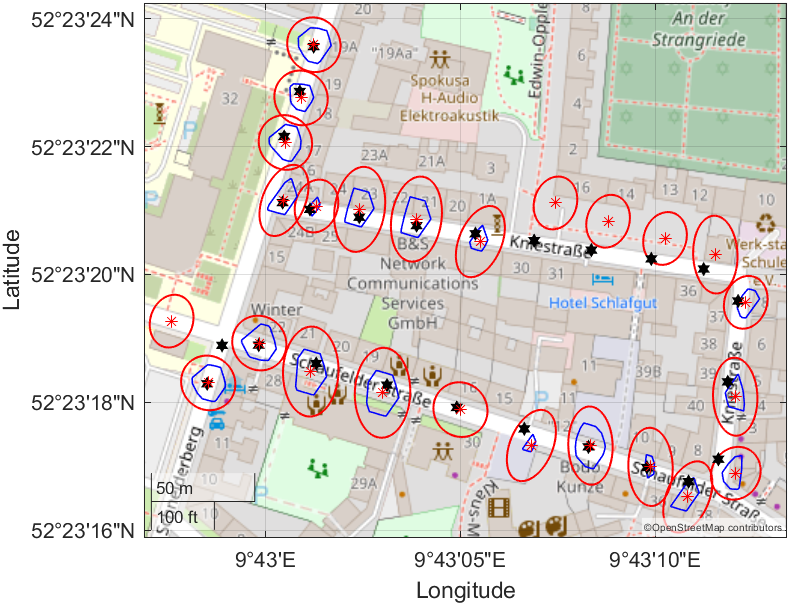
Fig1. Comparison of interval-based and stochastic uncertainty for GNSS positioning in an urban environment (from Schön et al 2022)
References
Schön S, Baasch K, Icking L, KarimiDoona A, Lin Q, Ruwisch F, Schaper A, Su J (2022): Towards Integrity for GNSS-based urban navigation – challenges and lessons learned, submitted to IEEE IV 2022, Workshop iLoc: High-integrity Localization for Automated Vehicles, Aachen
Su J., Schön S. (2021): Improved Observation Interval Bounding for Multi-GNSS Integrity Monitoring in Urban Navigation, Proc. 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 4141-4156 DOI: 10.33012/2021.18078
Dbouk H., Schön S. (2020): Reliable Bounding Zones and Inconsistency Measures for GPS Positioning using Geometrical Constraints, Acta Cybernetica, 24(3):573-591 DOI: 10.14232/actacyb.24.3.2020.16
Schön S., Brenner C., Alkhatib H., Coenen M., Dbouk H., Garcia-Fernandez N., Fischer C., Heipke C., Lohmann K., Neumann I., Nguyen U., Paffenholz J.-A., Peters T., Rottensteiner F., Schachtschneider J., Sester M., Sun L., Vogel S., Voges R., Wagner B., 2018: Integrity and Collaboration in Dynamic Sensor Networks, Sensors, 18, 2400, 21 pages; doi:10.3390/s18072400.



