Rozhin Moftizadeh, M. Sc.
Erstbetreuer: H. Alkhatib; Co-Betreuer: I. Neumann
Multi-Sensor System (MSS) georeferencing is a challenging task in engineering which should be dealt with in the most accurate way possible. An example of a MSS is an autonomous car which drives through an environment and should be able to locate itself safely. The easiest and most straightforward way of georeferencing is to rely on the Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) data. However, at indoor environments or crowded inner-city areas, such data lack enough accuracy to be entirely relied on. Therefore, appropriate filtering algorithms are required to compensate for such errors and to improve the results sufficiently. Sometimes it is also possible to increase the functionality of a filtering technique by engaging additional complementary information which can directly influence the outputs. Such information could be e.g. geometrical features of the environment in which the MSS runs through.
The main aim of this doctoral project is to develop a technique which can accurately localize a MSS in the most efficient way possible. The core idea is to integrate the Particle Filter algorithm in a way that can adequately engage geometrical features of the environment. The developed algorithm should be able to detect the outliers as well as insignificant measurements in a way that while preserving accuracy, the efficiency is also increased.
On the other hand, geometrical information of a real environment could also enlarge the unknown parameters (states) vector and thus affecting the algorithm efficiency. Therefore, the aim is to design the final Particle Filter algorithm in a way that divides the unknowns into two different parts. A part which is usually fixed in size and contains the pose parameters (position and orientation) of the MSS and a part which includes the additional geometrical features which can change in size from one epoch to the other. The latter is usually not as sensitive as the first vector, and thus its estimation can be stopped after a certain threshold is met. Therefore, resulting in a smaller unknowns vector size which consequently could be estimated faster. Such a strategy is generally referred to as Dual State estimation.
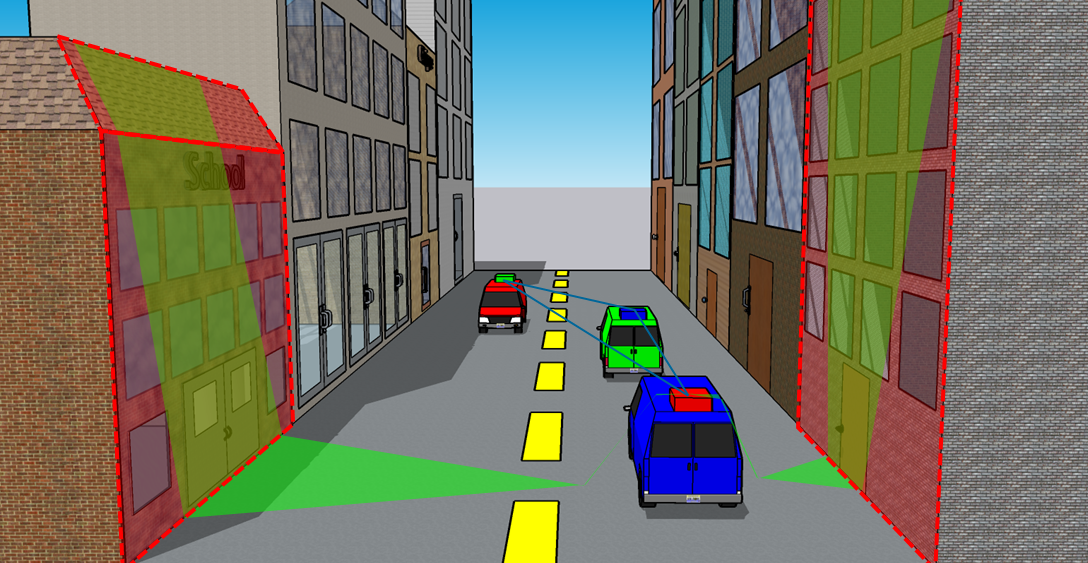
Finally, yet importantly is the concept of integrity which plays an essential role when it comes to MSS localization. The taken trajectory by a MSS or the configuration of the environment in which it runs through might allow no accurate and reliable georeferencing either by means of GNSS/IMU sensors alone or by taking into consideration additional collaborative information as well. On the other hand, there might be one or more MSS within the same environment which can be georeferenced accurately. If a proper network could be established between different MSS in the environment of interest, the inaccurate georeferencing problem might be well compensated for. Hence, developing appropriate techniques that preserve integrity is also a vital aspect which is sought within the current research project.
Nienburger Straße 1
30167 Hannover



