Das Graduiertenkolleg hat zum Ziel, Konzepte zur Sicherstellung der Integrität kollaborativ agierender Systeme in dynamischen Sensornetzen zu erforschen. Ausgangspunkt ist die Beobachtung, dass kollaborativ agierende und autonome Systeme in vielen Bereichen des (Arbeits-) Lebens Einzug halten: von der flexiblen Fabrikautomation über Service- und Haushaltsrobotik hin zu autonomen Fahrzeugen. Dies bedeutet, dass die Systeme sich nicht mehr abgeschirmt von den Menschen bewegen, sondern in ihrem direkten Umfeld bzw. sogar in direkter Interaktion mit ihnen, was ein großes Gefahrenpotential darstellt. Der Schlüssel zu dessen Beherrschung liegt in der Integrität der technischen Systeme, d.h. der rechtzeitigen Erkennung von Fehlern und Warnung des Umfelds.
Die Koexistenz einer zunehmenden Anzahl autonomer Systeme eröffnet die Möglichkeit – und Notwendigkeit – der Abstimmung. An Stelle einer Zusammenführung einfacher Sensorsignale in einem einzigen zentralen Steuergerät tritt die Kollaboration dezentraler Systeme, und an Stelle einer autarken Funktionsweise tritt die Einbeziehung externer Information, von anderen Sensorsystemen oder in Form von Vorwissen über die Umgebung.
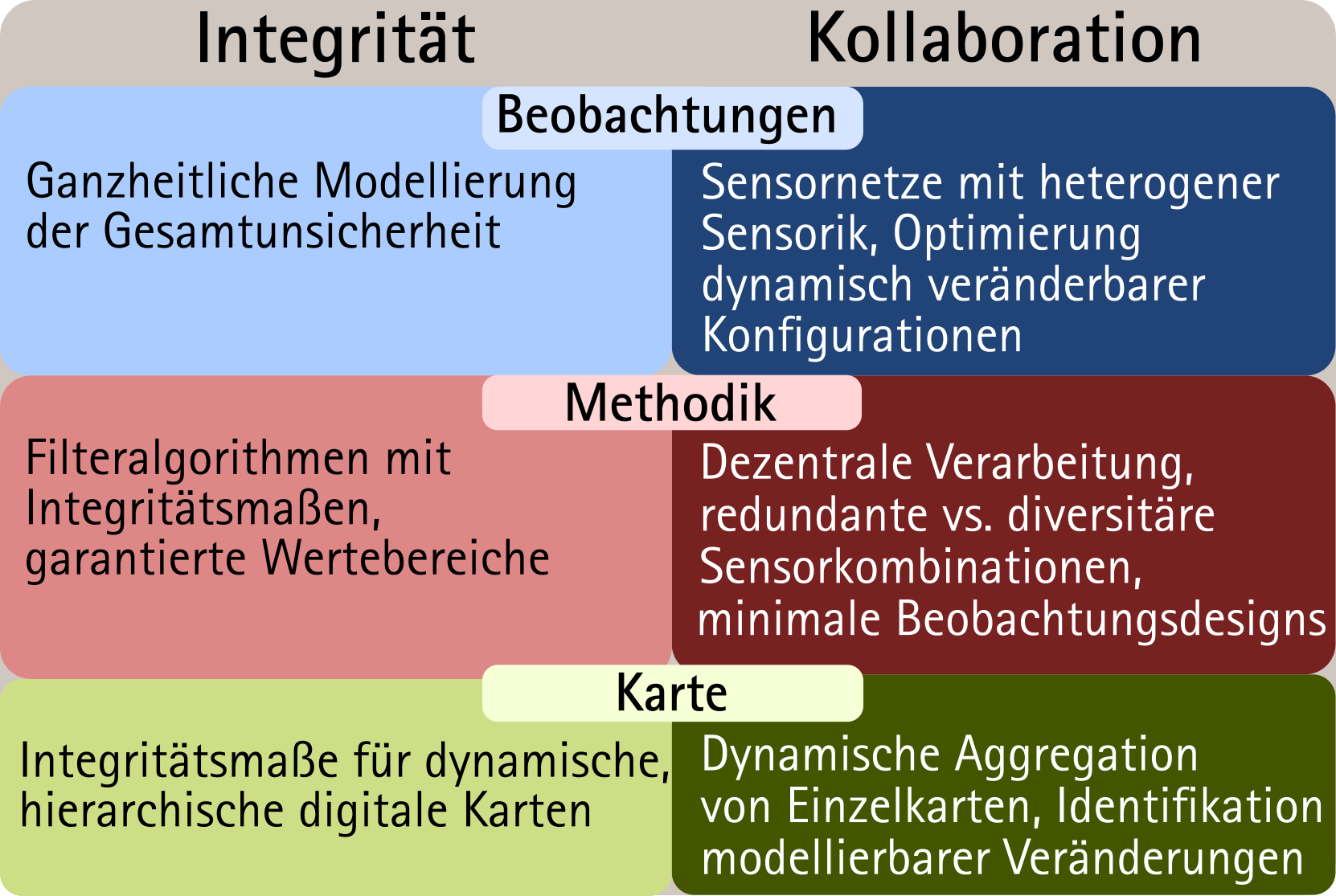
Hieraus ergeben sich die zwei Leitthemen des Kollegs: Konzepte für die Integrität technischer Systeme, sowie die Betrachtung der Kollaboration zwischen dezentralen Systemen in Form von dynamischen Sensornetzen, d. h. einer Gruppe von kommunizierenden, sich bewegenden Systemen, die mit Sensoren ausgestattet sind, beispielsweise autonomen Fahrzeugen.
Dabei konzentriert sich das Kolleg auf die Fragestellung der Zustandsbestimmung von dynamischen Sensornetzen, die hier als Bestimmung sowohl der kinematischen Größen, im Wesentlichen Position, Geschwindigkeit, Beschleunigung und Lageinformation, als auch von latenten Variablen, wie etwa der internen Kartenrepräsentation zum Vorhalten der Umgebungsinformation, verstanden wird. Für diese Fragestellung lassen sich drei Komponenten identifizieren:
- Die Beobachtungen, gewonnen durch Sensoren, welche die Eingangsgrößen zu bestimmten Zeitpunkten beschreiben,
- die Methodik, welche diese Beobachtungen unter Verwendung von Modellen interpretiert, sowie zugleich diese Modelle mittels der Beobachtungen fortschreibt und
- die Karte, ein (zeitlich variables) Modell der Umgebung, welche den aktuellen Kenntnisstand des Systems über seine Umgebung repräsentiert. Der Begriff Karte wird im Folgenden in diesem Sinne verwendet – d. h. als umfassender Begriff für eine Repräsentation räumlicher Sachverhalte und nicht im engen Sinn einer analogen topographischen Karte.
Das Forschungsprogramm
aufgegliedert anhand der Leitthemen Integrität und Kollaboration und der Komponenten Beobachtungen, Methodik und Karte mit jeweils zugehörigen Forschungsfragen